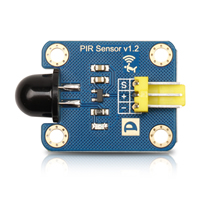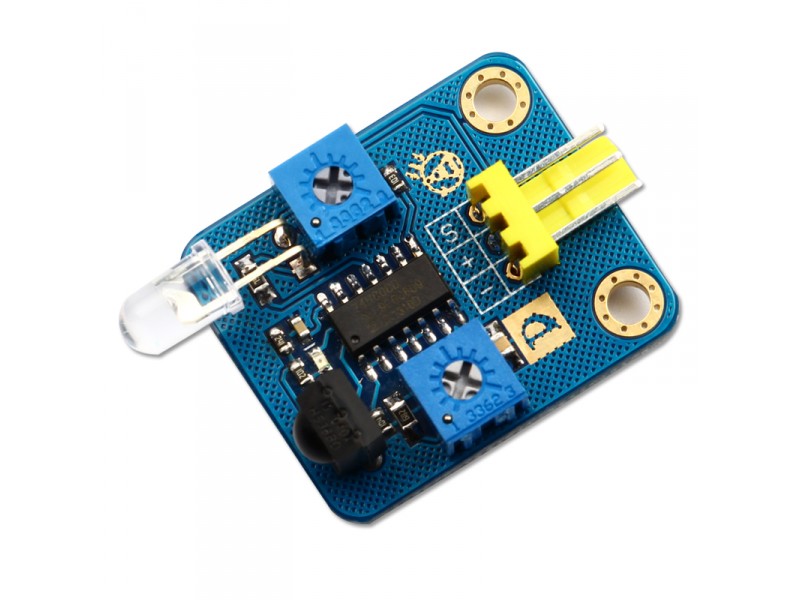
Mini IR Dectector是奥松机器人专为轮式机器人设计的一款距离可调式避障传感器。此传感器对环境光线适应能力强、精度高,其具有一对红外线发射与接收管,发射管发射出红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,此时指示灯亮起,经过电路处理后,信号输出接口输出数字信号,可通过电位器旋钮调节检测距离,有效距离2~40cm,工作电压为3.3V-5V,由于工作电压范围宽泛,在电源电压波动比较大的情况下仍能稳定工作,适合多种单片机、Arduino控制器、BS2控制器使用,安装到机器人上即可感测周围环境的变化。

避障传感器共有三个引脚,分别是GND、Vcc、S,实际应用时,可以将信号输出接口(S)接在Arduino UNO的一个数字引脚,例如D3引脚,同时利用数字引脚13自带的LED,当避障传感器检测到有障碍物时,输出为低电平,板载指示灯LED和UNO控制器D13引脚指示灯亮;当避障传感器没有检测到障碍物时,两个指示灯均熄灭。
1.工作电压:3.3v - 5v
2.工作电流:≥20mA
3.工作温度:-10℃ ~ +50℃
4.检测距离:2 - 40cm
5.IO接口:3线制接口(-/+/S/)
6.输出信号:TTL电平(有障碍物低电平,无障碍物高电平)
7.调节方式:电阻式调节
8.板载指示灯:红色LED
9.有效角度:35°
10.模块尺寸:38mm×25mm
11.模块重量:9g
12.固定孔:2个,M3固定孔
13.接口定义
S(反射信号输出):如果没有检测到物体,则S端口保持高电平;若检测到物体,则S端口置低。
+:接外部供电的Vcc。
-:接外部供电的GND。