仿生蜘蛛爬行机器人是应用仿生学原理,采用微型伺服电机作为执行单元,每足均由三自由度关节组成,通过2.4G无线操控,可实现迈步、蹬步前行,定点支撑,铁丝网攀爬,全方位回转侦测等复杂动作。主体可装载无线微型摄像头即时反馈图像实现远程监控,腿部安装弯曲压力传感器可反馈地形地质的变化,此机器人可推广用于军事地形侦测,野外搜救、信息采集、工业设备检测等。
1.动作种类多
2.仿生运动
1.产品名称:仿生蜘蛛爬行机器人
2.品牌: Aisrobotbase
3.货号:RB-17E014
4.尺寸:480*480*180mm)
5.重量:2.640kg
6.机器人类型:仿生机器人
7.工作电压:7-12V
8.主控器: Starduino控制器
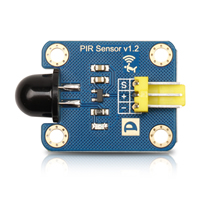
9.传感器:超声波传感器
10.控制方式:PS2手柄控制
11.操控距离:12m
12.环境类型:干用
13.零件材质:铝合金
14.零件颜色:银色
15.电池容量:7.4V/1200mAhx2
16.充电时间:3.0小时