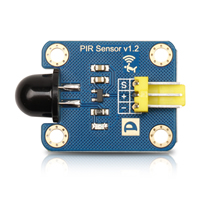
Arduino的Zumo机器人是一个Arduino可控的履带式机器人平台,小于10厘米×10厘米,小到足以获得Mini Sumo的资格。它包括两个连接到一对硅胶轨道的微型金属齿轮电机,一个不锈钢推土机式刀片,一个用于线路跟踪或边缘检测的六个红外反射传感器阵列,一个用于简单声音和音乐的蜂鸣器,一个3轴加速度计,磁力计和陀螺仪,用于检测冲击和跟踪方向。只需添加4节AA电池和一个Arduino(或兼容的控制器)即可推出!无需焊接或组装。
这款Zumo机器人是一款低调的履带式机器人平台,适用于Arduino(或兼容设备,如A-Star 32U4 Prime)作为其主控制器。它的每侧小于10厘米,使用Arduino Uno和电池重量约为300克(电池不含165克),因此它足够小,重量轻,足以参加Mini-Sumo比赛。它使用两个75:1 HP微型金属减速电机来驱动踏板,提供足够的扭矩和大约每秒2英尺(60厘米/秒)的最高速度,这使得它比Solarbotics Sumovore等竞争机器人更灵活。Parallax SumoBot仍然提供充足的控制。Zumo机器人包括0.036“厚度的激光切割不锈钢相扑刀片安装在机箱前部,用于推动其他机器人周围的物体,沿Zumo前缘安装的反射传感器阵列(相扑刀片后面)允许Zumo检测前方地面上的特征,例如用于跟随的线或用于避免的边缘。
1.集成75:1 HP微型金属减速电机,可提供良好的速度(每秒高达2英尺),动力和控制。
安装的六个红外反射传感器阵列,允许Zumo检测其刀片正下方的反射率对比度,可用于跟随线或检测边缘(例如相邻环的白色外部区域或桌子的边缘)。
2.集成的DRV8835双电机驱动器能够为Zumo的两个大功率减速电机提供足够的电流。
压电蜂鸣器,用于播放简单的声音和音乐。蜂鸣器由Arduino的一个PWM输出控制,因此可以在后台生成音调而不占用大量处理能力。
3.集成的LSM303D 3轴加速度计和3轴磁力计,可用于检测冲击。指南针受到电机,电池,PCB及其周围环境的大量干扰,因此通常不适用于精确导航,但我们发现通过适当的校准,它可用于在许多环境中进行粗略定向测量。这部分是对Arduino以前版本的Zumo屏蔽中包含的LSM303DLHC加速度计/磁力计IC 的升级。
4.集成的L3GD20H 3轴陀螺仪,可用于跟踪旋转。这是Zumo盾的v1.2版本的新功能; 以前的版本不包括陀螺仪。通过上述传感器和LSM303D,屏蔽有效地具有内置的MinIMU-9 v3 IMU模块,可以选择用于制作姿态和航向参考系统(AHRS),以便您的机器人可以进行定位。
5.引脚12上的可选用户按钮。
6.7.5 V升压调节器,用于从Zumo的4节AA电池为Arduino供电。
7.通过屏蔽可方便地访问Arduino I / O线,引脚13用户LED和Arduino复位线。
8.通用原型区域和前部的扩展区域,用于连接其他传感器。
9.兼容Arduino Uno R3和Arduino Leonardo。也可以与具有相同外形的旧Arduinos一起使用,例如Duemilanove
10.Arduino库和示例代码使入门变得简单。
11.详细的用户指南。